Khuong Nguyen
Ph.D, M.Phil, B.Sc
Indoor Positioning
The problem
Global Navigation Satellite Systems (GNSS) such as GPS have been successfully deployed in the past two decades, and are indispensable for outdoor navigation.
However, people spend most of their times indoors, where limited or no GNSS service is available at all, because the satellites signals are too weak to penetrate the building.
More importantly, GPS, with an average of 5-10 metre accuracy, cannot provide the indoor users with the positioning accuracy they need for room-level tracking.
My approach
My research utilises the existing structures (e.g. the WiFi network) and the smartphone to provide the positioning service.
The idea is creating a training database to reflect how the signal propagates inside the building.
This is normally done by an expert holding a WiFi-enabled device (e.g. smart phone, laptop) walking around to record the signal at different locations, along with a positioning label.
When the user wishes to discover her whereabouts, she measures the signal at her current position. The system then looks through the training database to find a nearest match. This process is called 'Location Fingerprinting'.
Nevertheless, the challenges for most signal-based indoor positioning systems are the unpredictable signal propagation caused by the complex building interiors, and the dynamic of the environment caused by the peoples' movements.
Hence, we proposed a novel technique to specify how certain the system's location estimation is.
For example, at 90% confidence, our algorithm guarantees that the true location will be inside our prediction border up to 90% of the time.
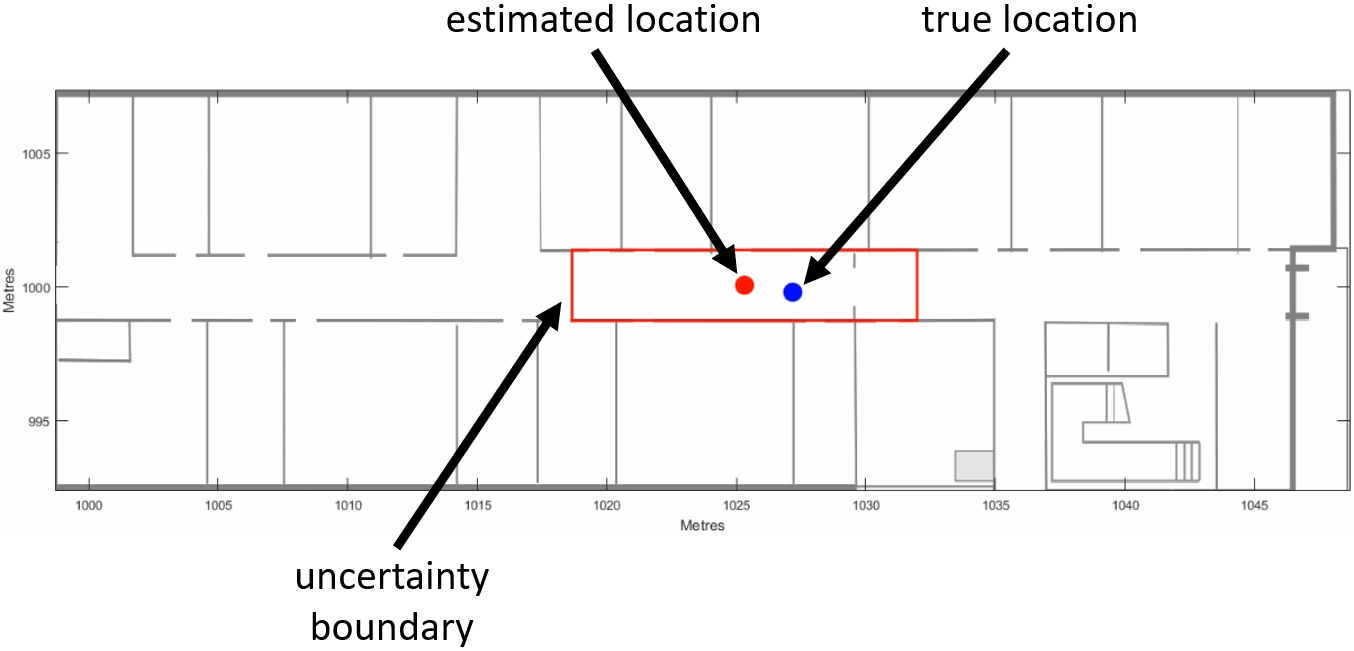
Below is a video showcasing two versions of our algorithm estimating the user location in real time.
The blue dot is the true position. The Red dot is the system estimated position, whereas the black cross is the current state-of-the-art using Naïve Bayes.
In the top figure, the funky looking shape is the probability distribution of where the estimated locations are.
Positioning accuracy wise, both algorithms achieve below 2 metres most of the time, which are slightly better than Naïve Bayes.
Range wise, regression version returns slightly smaller interval, at the same confidence level.
Another benefit of our approach is the ability to modify the size of our location estimation by altering the confidence level parameter. Below is another video demonstrating that effect.
Publications
Interested researchers are invited to follow our papers and journals.1) Nguyen, Khuong An, and Zhiyuan Luo. "Selective mixture of Gaussians clustering for location fingerprinting." In Proceedings of the 11th International Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services (Mobiquitous 2014), pp. 328-337. ICST (Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering), 2014.
2) Nguyen, Khuong An, and Zhiyuan Luo. "Reliable indoor location prediction using conformal prediction." Annals of Mathematics and Artificial Intelligence 74, no. 1-2 (2015): 133-153.
3) Nguyen, Khuong An, and Zhiyuan Luo. "Dynamic route prediction with the magnetic field strength for indoor positioning." International Journal of Wireless and Mobile Computing 12, no. 1 (2017): 16-35.
4) Nguyen, Khuong, and Zhiyuan Luo. "Conformal prediction for indoor localisation with fingerprinting method." In IFIP International Conference on Artificial Intelligence Applications and Innovations, pp. 214-223. Springer, Berlin, Heidelberg, 2012.
5) Nguyen, Khuong An. "A performance guaranteed indoor positioning system using conformal prediction and the WiFi signal strength." Journal of Information and Telecommunication 1, no. 1 (2017): 41-65.